
Page 41 - Website 108
P. 41
2
dOŁQ²�« Ê√ È√® V f l� Damping Torque bOL�²�« Æ„d×LK� vD)«
l�Ë ÆÆ©rJײ�« …—U?ý« Èu²�?� l� dOG²¹ b?L<« uCŽ o¹dÞ sŽ „d;« w� rJײ�« j³ðd¹ ULMOÐ
Ác¼ ©±¥® r�— qJA�« 5³¹ ÆUC¹√ N WŽd��« WLO� ∫WO�U²�« UEŠö*UÐ Armature Control ÃU²½ô«
ÆhzUB)« UO�OÞUMG� Ë√ W�uHK� ‰U:« W�uEM� ÊuJð b� ≠
XÐUŁ —UOð —bB� l� ‰U?:UÐ rJײ�« W�UŠ ≠≤ ÆWLz«œ
∫ÃU²½ô« uCF� w� rJײ�« d³J* …—b?I�« 4I� qÐUI¹ Ê√ …—Ëd{ ≠
U³KD²* UO?³�½ v�UF�« …—bI�« 4I� ÃU?²½ô« uCŽ
∫W�U(« Ác¼ ©±μ® r�— qJA�« q¦1
Φ = KΦ If = KΦ (Vf / Rf) ÆÃU²½ô« uCŽ
T = KT Φ IA = K3 Vf tBzUBšË ÃU²½ô« uCF� s�e�« XÐUŁ ÊuJ¹ Ê√ ≠
Vf l� VÝUM²¹ ÂeF�« Ê√ `C²¹ ÆÆW�œUF*« Ác¼ s�Ë wJO?�UM¹b�« ¡«œú� 5³?ÝUM� dO?ž ÆÆW?O�?OÞUMG*«
ÆW�uEMLK�
bL<« dOŁQ²�« Ê√Ë ÆÆN WŽd��« vKŽ «bÐ√ bL²F¹ ôË
Ác¼ ©±∂® r�— qJA?�« 5³¹Ë Æd?H?B�« ÈËU?�¹ ÆÆWO²�u?� —bB� s� ÃU²½ô« u?CŽ W¹cGð bMŽË
ÆhzUB)« «c¼ b¹Ëeð ÆÆ ôU??(« VKž√ w� U¹—Ëd??{ ÊuJ¹
ÆÆ—UO?²�« …œU¹“ s� b×K� W?³ÝUM� WKO?ÝuÐ —bB*«
U³?Ł l� ÃU²½ô« u?CŽ WO?²�uHÐ rJ?ײ�« ≠≥ ÃU²½ô« uCŽ w� …d�b*« WO�UF�« «—UO²�« Ê_ p�–Ë
∫…—UŁô«
w� DC W?�b??)« U?�d?×?� «e??O2 sLJð WOzUÐdNJ�« WF�«b�« …uI�« WLO� nK²�ð U�bMŽ d9 b�
d�uðË ÆÆrJ×?²K� dL²?�*« —UO²�« …—U?ý≈ UN�«b�?²Ý« ∫W�U(« Ác¼ ©±∑® r�— qJA�« q¦1 Æ…dŁR*« WO�dD�« WO²�u?H�« sŽ «dO¦� WO�JF�« EMF
»uKÝô UI?�Ë WŽd?��« l� ÂeFK� …œbF?²� U?�öŽ E = NΦ / KN ÎUO?M�“ ΫdšQð —U?O²�« s� b?(« …dz«œ sLC?²ð b�Ë
T = KT Φ IA = KT Φ [(V- E) / Ra] = K4 V - K5 N
uC?Ž ‰UL?F²Ý« s� wðQ?²� ÆÆ»u?OF�« U�√ Ær?Jײ�« w� …dÐU?F�« WO�UF?�« «—UO²�« 5J?L²� Time Delay
W¹œU?L?²Žô« ÷U?H?�½«Ë ÆÆCommutator q¹b?³²�« l� UM¼ VÝUM²¹ ·UI¹ô« Âe?Ž Ê√ ÆÆ`C²¹ YOŠ Æ…dOB� WOM�“ …d²H� —Ëd*« s� ÃU²½ù« uCŽ
œœd²�« qš«bð s� q?�UA� d?NEð b� UL?� ÆÆW�Ë«b*«Ë bO?L�²�« Âe?Ž VÝUM²¹ ULMOÐ ÆÆV …dŁR*« WO?²�uH�« iO?H�« q¦1 Φ ÊS?� ÆÆqOK% s� vK¹ U?L?O?�Ë
bMŽ —dA�« sŽ " UM�« Radio Frequency vJKÝö�« ÆXÐUŁ bL<« d?OŁQ²�« Ê√ È√ ÆÆjI� N WŽd��« vKŽ WŽd?Ý q¦1 N Ë ÆÆÂeF�« q¦1 T Ë ÆÆv�OÞUMG*«
Æq¹b³²�« uCŽ `DÝ vKŽ Brush Arcing ‘dH�« 5³� u¼ UL� UM¼ WŽd��« l� ÂeF�« U�öŽ ÊuJðË ÷«d²�« l� ÆÆVÝUM²�« XЫuŁ K Ë ÆÆÊ«—Ëb�« œuLŽ
ÈËU�¹ W�öFK� qO� l� sJ�Ë Æ©∑® r�— qJA�« w� ÆwDš jMG9 hzUBš
ÆÆ…—b?I�« W?O�UŽ W?�b?)« U?�uEM� w� Àb?×¹
uCŽ W?O²�u� w¼ rJײ�« WO²�u?� ÊuJð UL� ÆÆ K5
…—«œô ©DC Ë√ AC ® W?�bš U?�d?×� «b?�²?Ý« WO?²�u� —b?B� l� ‰U?:UÐ rJײ�« W?�UŠ ≠±
ÆVÃU²½ô«
Hydraulic Servo- W?OJO�Ë—bO¼ W?�bš U?�UL?� ∫ÃU²½ù« uCF� W²ÐUŁ
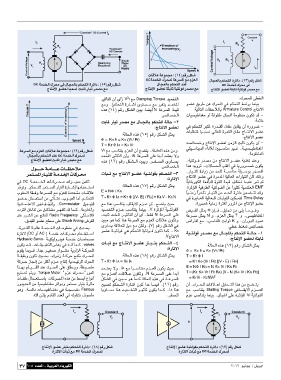
ÊuJ¹ b?� ÆÆ U?IO?³D²�« iFÐ w� t?½√ UL?� Ævalves U?³Ł l� ÃU?²½ô« u?CŽ —U?O?²Ð rJ×?²�« ≠¥ ∫W�U(« Ác¼ ©±≥® r�— qJA�« q¦1
ÂuI¹ U0d?� ÆÆ«bł d?OG� —«u?A� W¹Ë«e�« W?�d×K� ∫…—UŁô« Φ = KΦ If = KΦ (Vf / Rf)
W?HOþË ÊuJð YO?×Ð ÆÆ„d³½“ W?�dŠ `³JÐ „d?;« ∫W�U(« Ác¼ ©±∏® r�— qJA�« q¦1 T = KT Φ I
W�d?Š “U$≈ s� d¦�√ Âe?Ž ÃU²½≈ WO�?Ozd�« „d;« T = KT Φ IA = K6 IA = KT KΦ (Vf / Rf) [(V - E) / RA]
«c?NÐ ÂU?O??I�« bMŽ „d?;« vKŽ oKD?¹Ë ÆWþu?×K� bL?²F¹ ôË ÆÆIA l� U³?ÝUM²� Âe?F�« ÊuJ¹ YOŠ E = NΦ / KN = N KΦ Vf / KN Rf
lOMBð r²¹Ë ÆTorque Motor ¢ÂeŽ „d?×�¢—Ëb�« l� Âe?F�« U�ö?Ž ÊuJðË ÆN WŽd?��« vKŽ «bÐ√ T = (KT KΦ Vf / Rf RA) [V - N (KΦ Vf / KN Rf)]
U?HK� ‰UL?F²?ÝUÐ U�d?;« Ác¼ s� j�Ð√ Ÿ«u½√ qJA�« w� 5³?� u¼ UL?� W�U(« Ác¼ w� W?Žd��« = K1Vf - K2NVf 2
“Ëb¹b(« s� WO�OÞUMG� dz«ËœË dL²�� —UO²Ð …—U¦� `³Bð rJ×?²�« …—Uý« Êu� «bŽ U?LO� ÆÆ©±∂® r�— Ê√ ÆÆ„d?;« U�ö?F� qOK×?²�« «c¼ s� `C?²¹
u¼Ë ÆÆW?Lz«œ U?�OÞU?MG� w� W?−?�bM� Ferrous U¹ËU?�� UM¼ b?OL?�²�« d?OŁQð ÊuJ¹ UL?� ÆÆIA UM¼ l� VÝUM²¹ Stalling Torque v�U??I¹ô« Âe??F�«
ÆtK�« Ê–SÐ ÂœUI�« œbF�« w� t�ËUM²½ ·uÝU� ÆdHBK� ÂeŽ VÝUM²¹ ULMOÐ ÆƉU:« vKŽ …dŁR*« Vf WO²�uH�«